Research
This page outlines our lab’s core focus and expertise in the field of robotics research, arranged based on major research topics.
Learning-based Control
Legged robots often face challenges due to their high degrees of freedom and the difficulty of accurately modeling complex environments. These factors discourage the development of robust and stable controllers. However, by leveraging reinforcement learning(RL) techniques, we have successfully developed locomotion controllers that enable the quadrupedal robots to adapt and traverse through challenging terrains such as rough, slippery, and deformable surfaces. This learning-based approach not only improves robustness and stability but also reduces dependency on accruate and computationally intensive models, making our controllers well-suited for practical applications in dynamic and unpredictable environments.

Learning-based locomotion on various terrains
Through extensive experimentation, we have demonstrated the effectiveness of our RL-based locomotion controllers. The list of our work is shown below.
Yunho Kim, Hyunsik Oh et al., Not Only Rewards But Also Constraints: Applications on Legged Robot Locomotion. IEEE T-RO 2024 paper_kim24 video_kim24
We propose a reinforcement learning framework that maximizes rewards while meeting constraints, applied to train legged robots for challenging terrains.

Proposed RL Framework
Joon Hyub Lee, Hyunsik Oh et al., RobotSketch: An Interactive Showcase of Superfast Design of Legged Robots. SIGGRAPH 2024 paper_oh24 video_oh24
Designing robots with complex, articulated parts is challenging. Our solution streamlines this process through 3D sketching, AI-driven movement generation, and VR-based review, optimizing early-stage development.

The RobotSketch Interface
Seunghun Jeon, Moonkyu Jung et al., Learning Whole-body Manipulation for Quadrupedal Robot. IEEE Robotics and Automation Letters 2024 paper_jeon24 video_jeon24
We propose a learning-based system for enabling quadrupedal robots to manipulate large, heavy objects using their whole body. Our method does not require explicit object modeling and offers significant computational efficiency compared to optimization-based methods.

Quadrupedal Whole-Body Manipulation Overview
Donghoon Youm, Hyunyoung Jung et al., Imitating and Finetuning Model Predictive Control for Robust and Symmetric Quadrupedal Locomotion. IEEE Robotics and Automation Letters 2023 paper_youm24 supplement_youm24
We introduce a novel Imitating and Finetuning Model Predictive Control (IFM) framework that combines model-based control and learning algorithms to improve legged robot performance. The framework trains a controller using imitation learning and refines it with deep reinforcement learning for handling challenging terrains. Simulations and hardware tests show that IFM significantly enhances footstep coordination, gait symmetry, and energy efficiency on rough and slippery surfaces compared to traditional methods.

IFM Framework Overview
Suyoung Choi et al., Learning quadrupedal locomotion on deformable terrain. Sci. Robot. 8, eade2256(2023) paper_choi23 video_choi23
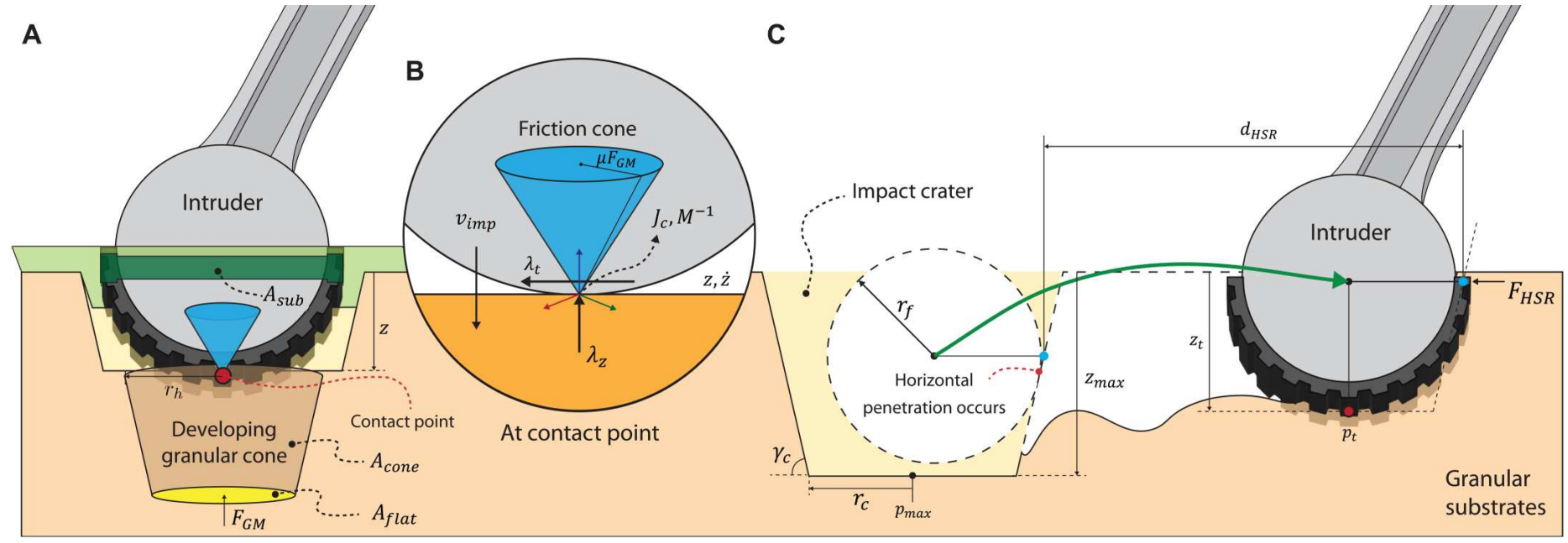
Contact model of deformable terrains
Gwanghyeon Ji et al., Concurrent Training of a Control Policy and a State Estimator for Dynamic and Robust Legged Locomotion. IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 4630-4637, April 2022 paper_ji22 video_ji22
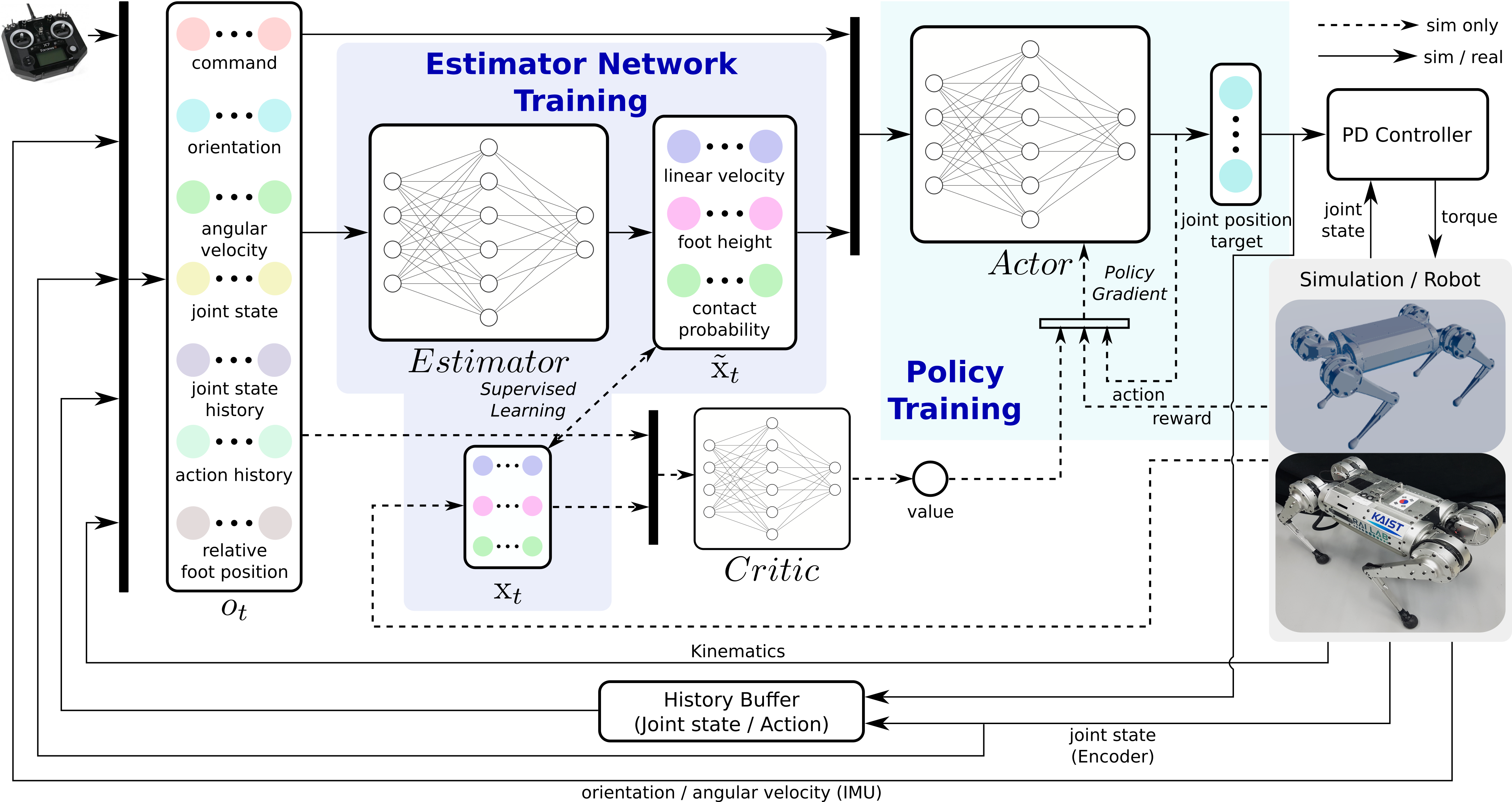
Concurrent training architeture
Blind locomotion through the natural environment characterized by steep slopes and scattered debris (ongoing) video_compiled video_hiking
Dynamic locomotion for traversing stepping stones (ongoing)
Autonomous Navigation
Legged robots have great potential for exploring a diverse range of environments accessible to both humans and animals. These encompass urban settings as well as natural landscapes like forests and mountains. However, navigating autonomously in these environments is challenging as it requires the integration of semantic and geometric reasoning for path planning, and the consideration of the robot’s physical constraints and controller characteristics for path tracking.
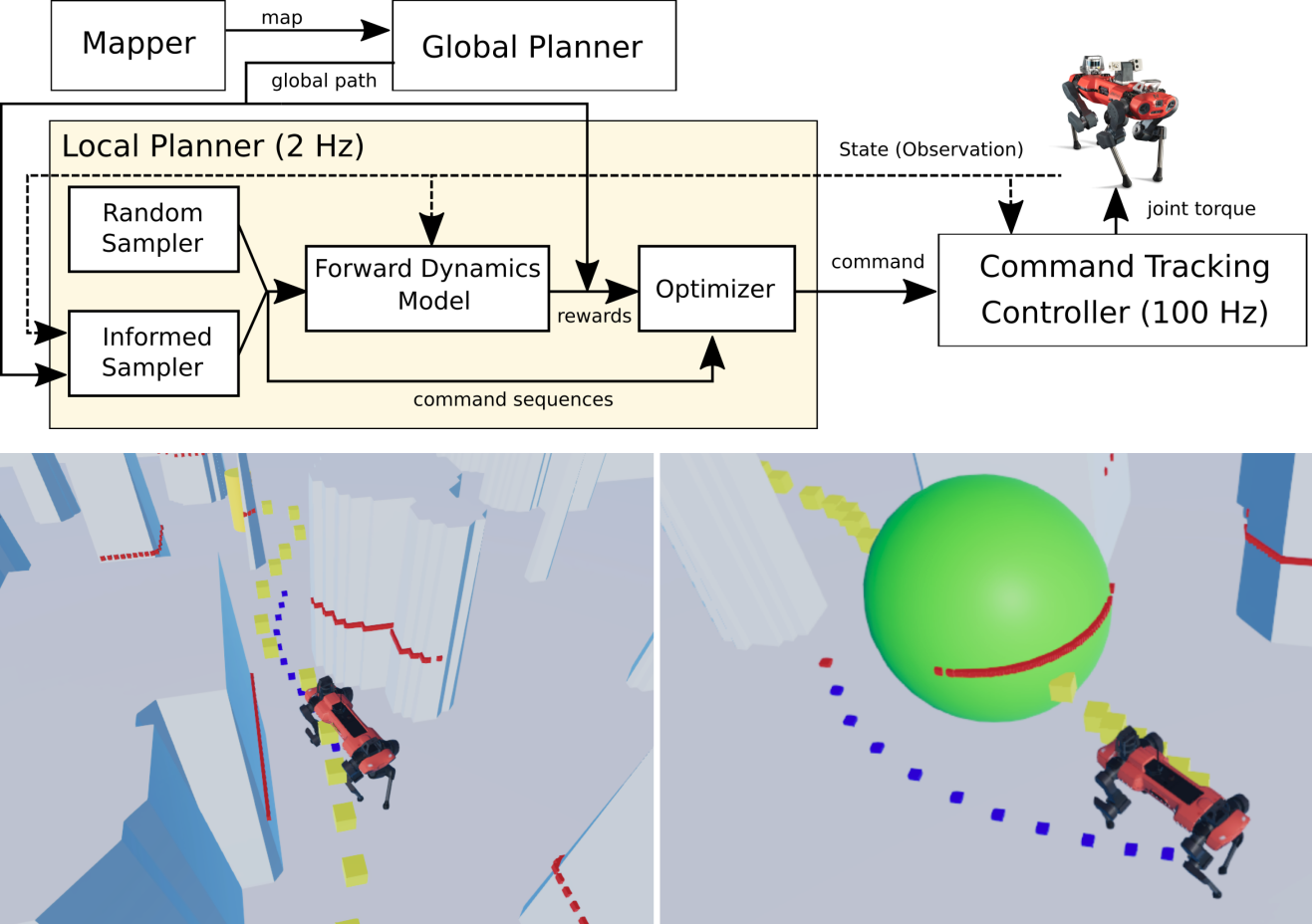
Autonomous navigation framework (Top), Testing in the physics simulation (Bottom)
In our lab, we’re actively combining learning-based approaches with classical methods to build an autonomous navigation framework. The framework includes traversibility estimation, efficient path and motion planning, and precise path tracking algorithms. Our ultimate goal is to develop a navigation system that can be applied to various tasks, including autonomous indoor and outdoor inspections. The list of our work is shown below.
Jeong Hyun Lee, Jinhyeok Choi, et al., Learning Vehicle Dynamics from Cropped Image Patches for Robot Navigation in Unpaved Outdoor Terrains. IEEE Robotics and Automation Letters (RA-L) 2024 paper_lee24 video_lee24
Building on our work in autonomous navigation, we address the challenges of unpaved outdoor environments with high-dimensional sensor data by developing Crop-LSTM. This novel approach enhances local feature extraction from cropped image patches, improving predictions of the robot’s future position and orientation. We validated Crop-LSTM on our Raicart platform, successfully navigating challenging terrains using RGBD images.

Dynamics Learning Framework
Yunho Kim et al., Learning Forward Dynamics Model and Informed Trajectory Sampler for Safe Quadruped Navigation. Robotics: Science and Systems 2022. paper_kim22 video_kim22
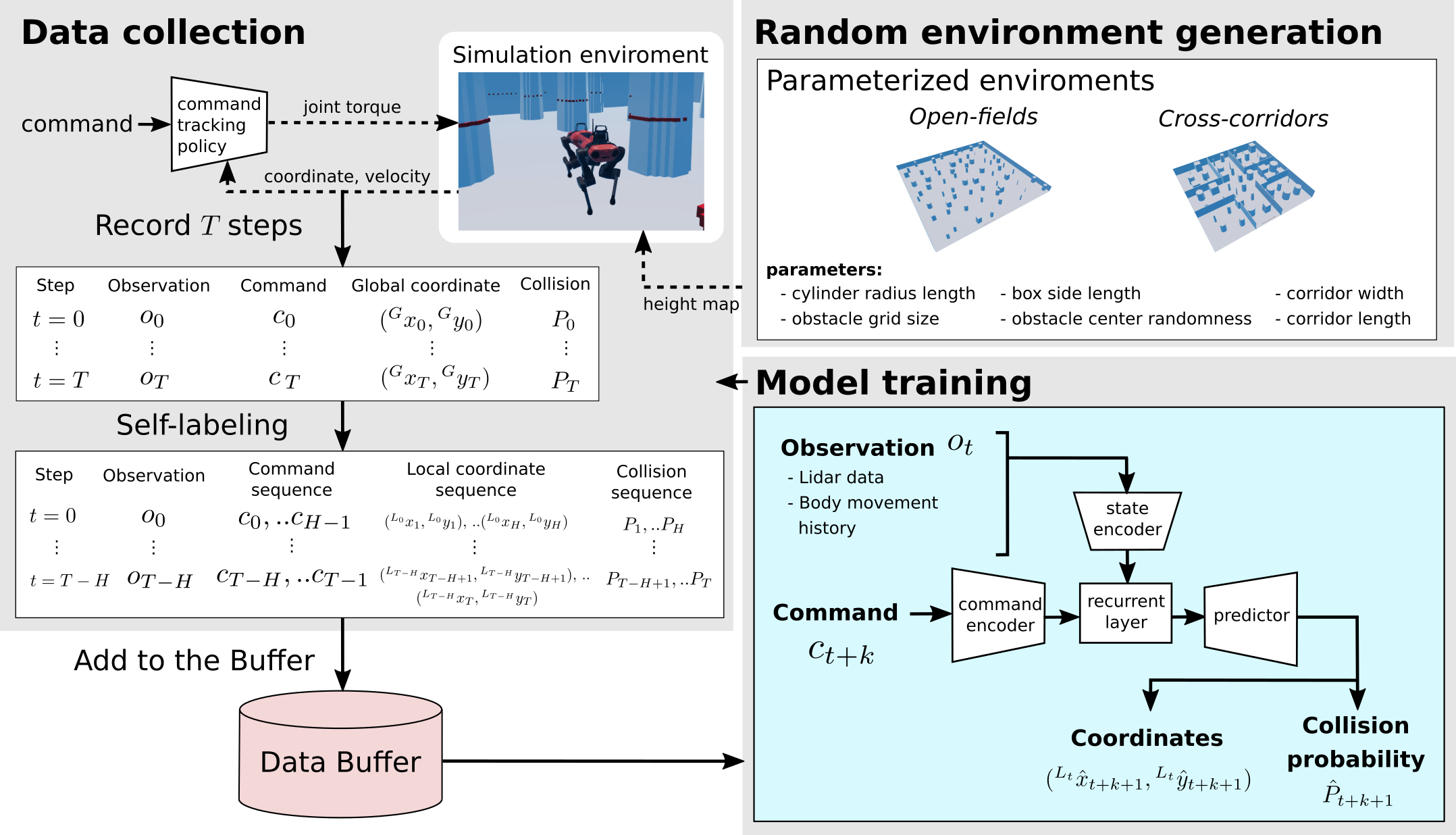
Forward dynamics model training pipeline
Hardware Platform
Mechanical Design
Our Lab directly creates all the components to experiment with a controller to which the learning algorithm is applied.
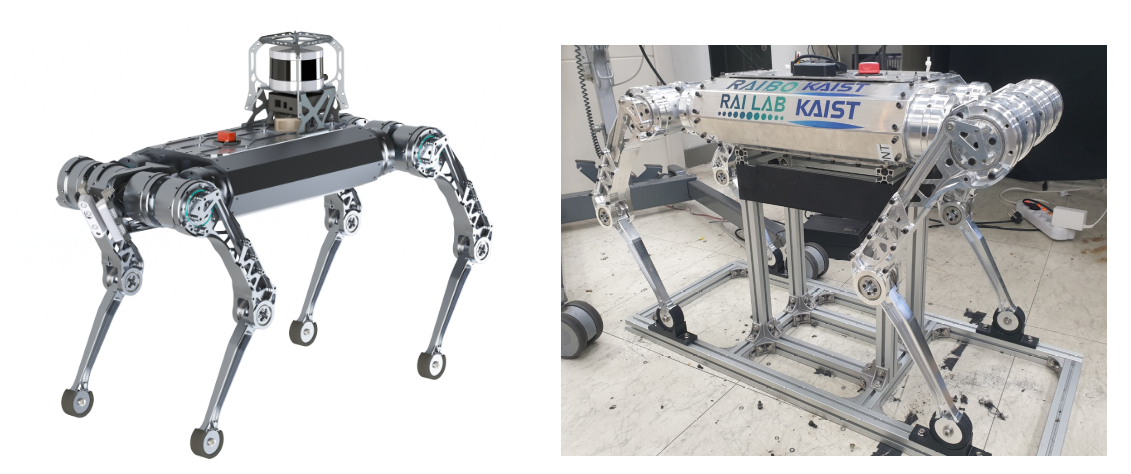
Raibo
Raibo, made by Railab, has hardware that can withstand shocks under various conditions and operate robustly regardless of the environment. We also design its own driving units, which are key components consisting of motors, motor reducers, encoders, and motor drivers. With its own form factor, it plays a major role in achieving high efficiency during operation.
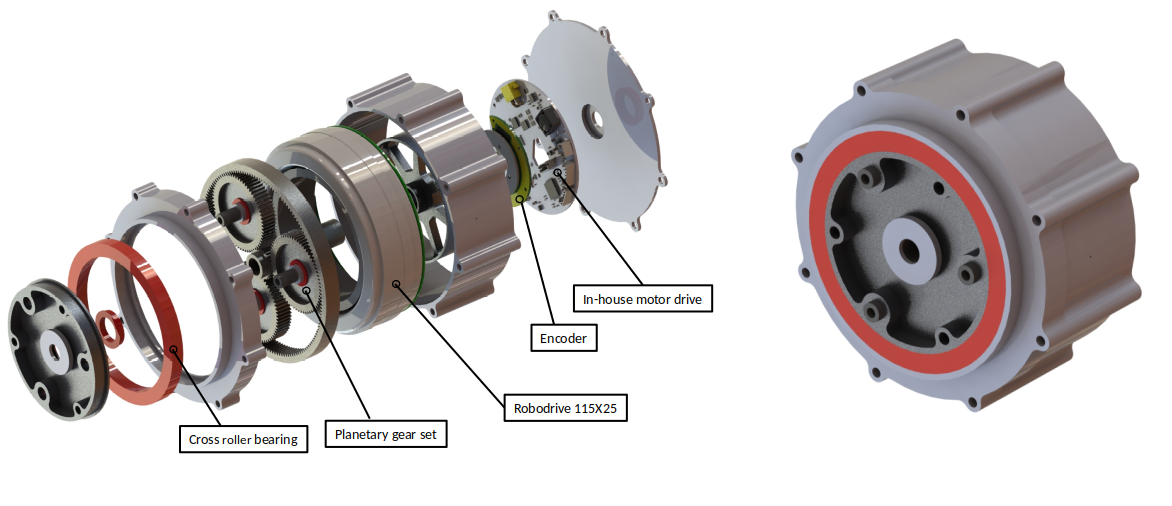
Raibo driving units
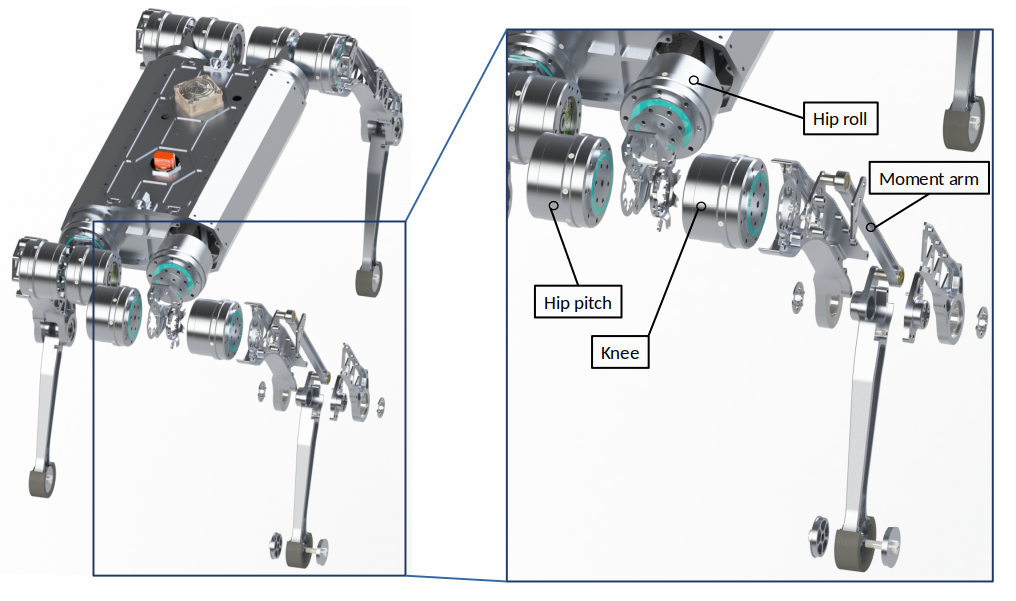
Raibo Leg Design
Through various simulations, we demonstrate that we can operate robustly and efficiently in various situations. The list of our work is shown below.
Hwangbo, et al. Cable-driven actuation for highly dynamic robotic systems. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2018. Paper3
Electrical Design
We are rigorously pursuing research in the electronics sector for pushing hardware utilization to the extreme. Our research extends from designing power circuit, crucial for handling inrush currents and regenerative braking during impacts, to high-power, high-bandwidth motor drivers. The circuit design, artwork, SMT, and testing are all performed in-house.
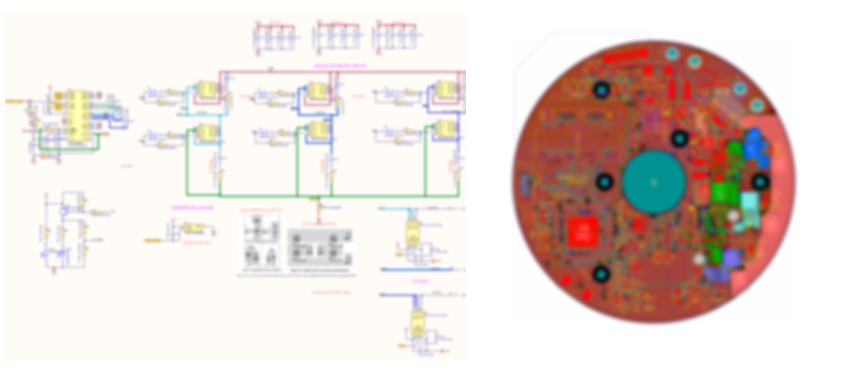
Circuit drawing (Left), Component layout (Right) [Blurred image for security]
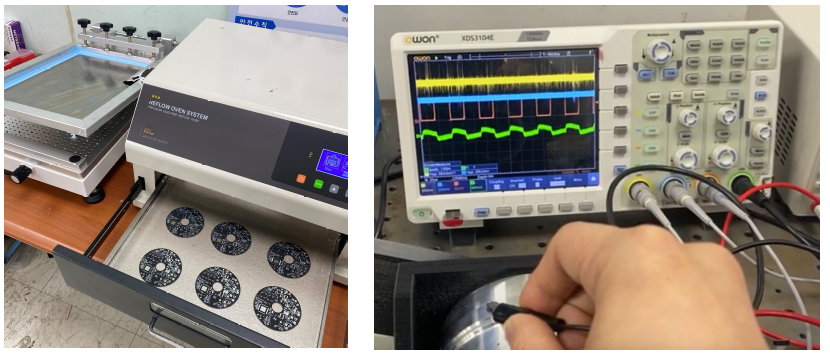
SMT assembly (Left), Testing (Right)
Leveraging our deep understanding of power electronics and robotic systems, we are not just enabling robots to utilize the extreme area of motor capabilities, but also contributing to bridging the sim-to-real gap. Furthermore, taking into account the characteristics of each electronics component, we can build high power and low noise motor driver in a small form factor and facilitate it into efficient locomotion.